
Programmation de robots basée sur CAO/FAO pour le fraisage non défini par l’utilisation de robots
Centres de coupe et d’usinage précis et fiables, des mots rarement utilisés pour décrire les bras de robots industriels. Les robots sont souvent dénigrés dans les cercles de production, car on les trouve imprécis. En parlant de tolérances de +/- 0,100 (ou plus), les robots sont souvent écartés, car ils sont uniquement envisagés pour le soudage ou le bras-transfert. Avec une meilleure précision initiale dans l’usine et des méthodes de calibration permettant aux robots de fournir des tolérances de 0,005 po (ou moins), les robots ne sont plus rares dans les applications d’usinage.
La technologie robotique devenant plus performante, de nouvelles applications sont constamment créées pour les robots dans le domaine de la fabrication. Ils sont maintenant utilisés pour des tâches que l’on pensait auparavant réservées aux machines CNC. Pour les nouveaux défis mécaniques, les logiciels font de même afin de répondre au besoin de solutions d’automatisation qui offrent un meilleur contrôle et une plus grande efficacité. Les opérations CNC disposent de nombreuses suites logicielles qui fournissent de la programmation. Cependant, les opérateurs de robot se sont souvent appuyés sur l’apprentissage manuel des mouvements de robots à l’aide d’une console d’apprentissage. Les méthodes d’enseignement manuel prennent souvent beaucoup de temps et ne sont pas précises.
La programmation hors ligne est une manière plus rapide de produire des trajectoires de robots. La programmation de trajectoire de robot peut se faire à partir d’un ordinateur, pendant que le robot peut continuer de fonctionner avec un programme en cours. La programmation hors ligne n’est certes pas un nouveau concept. La simulation avec robot et les suites de programmation hors ligne sont utilisées depuis des dizaines d’années. Ce qui est nouveau, c’est le logiciel de programmation hors ligne avec des fonctionnalités qui peuvent profiter des meilleures tolérances de robot : Des fonctionnalités telles la production de trajectoires de robots à partir de données CAO/FAO.
Pas un convertisseur de code G
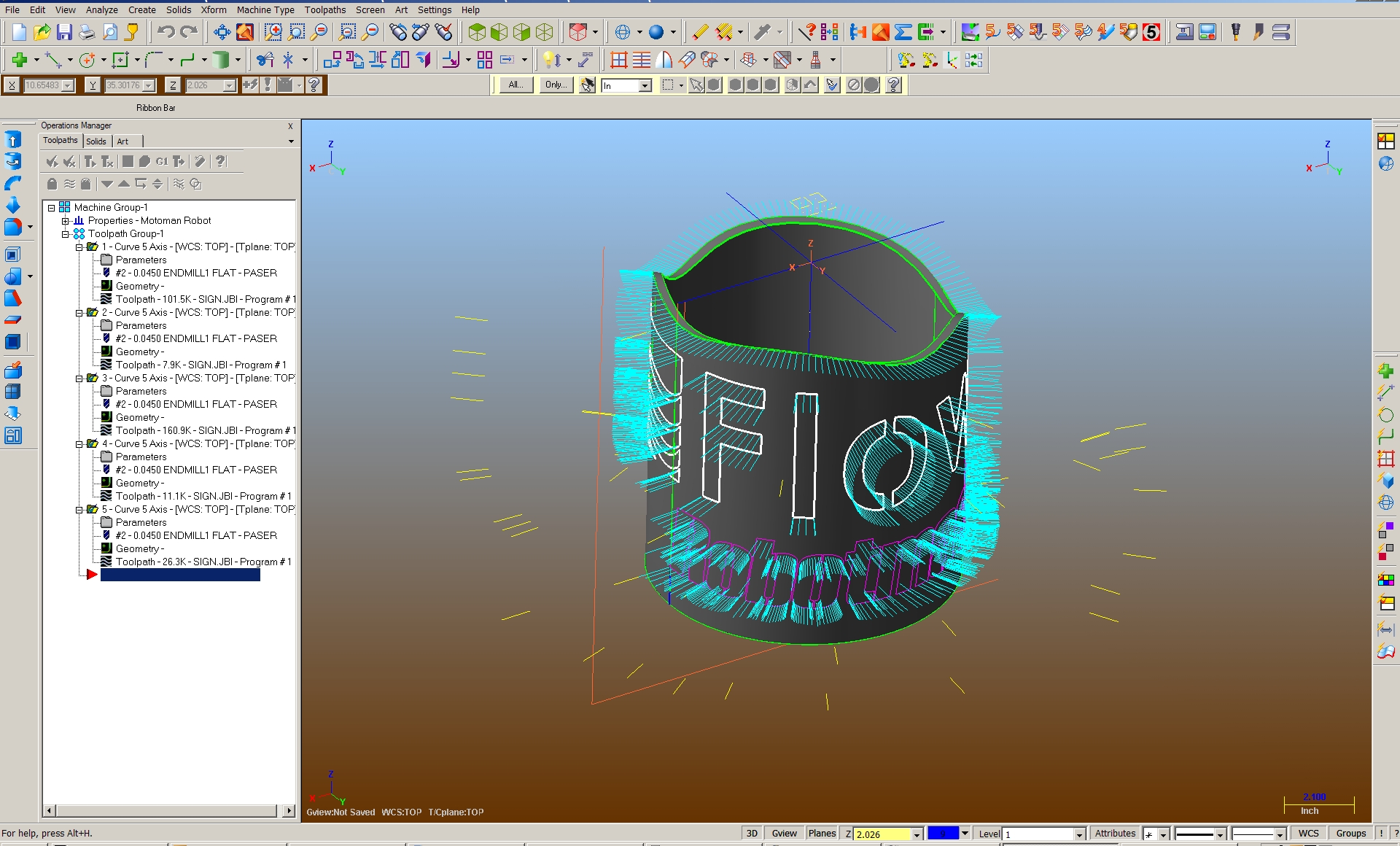
Robotmaster est un module de simulation et programmation hors ligne construit sur Mastercam pour la création de trajectoires de robot précises à 6 axes à partir des informations de trajectoire d’outils. Il s’agit déjà d’un outil logiciel reconnu dans la majorité des usines de fabrication nord-américaines.
Mastercam fournit un environnement CAO/FAO familier aux utilisateurs de Robotmaster. Robotmaster élimine la dépendance à la formation ou à la création de points à enseigner en utilisant la géométrie CAO afin de créer des trajectoires d’outils. Les données relatives aux trajectoires d’outils sont traitées hors ligne, comme les instructions du robot natif dans un fichier, prêtes à être téléchargées dans un contrôleur de robot. Par exemple, avec un robot Motoman, le post-traitement crée un fichier JBI. Le fichier peut alors être transféré vers la carte mémoire ou l’endroit où les données sont transférées au robot, et les opérations du fichier JBI peuvent être produites par le robot. Robotmaster n’est pas un convertisseur de code G. Il traite plutôt, en une étape, les données de trajectoire d’outils
afin de créer avec précision des trajectoires de robot tout en offrant une interface permettant aux utilisateurs de programmer intelligemment leurs robots. L’interface donne la possibilité de modifier les paramètres qui dirigent le fonctionnement du robot. L’opérations des mouvements, le positionnement du robot et le contrôle des outils peuvent tous être modifiés tout en pouvant contrôler l’orientation de l’axe du robot afin de traiter les pièces de façon optimale. Par ailleurs, Robotmaster offre une simulation complète de cellules robotisées et une variété de fonctionnalités de vérification des erreurs afin d’assurer une programmation hors ligne sûre avant la mise en œuvre.
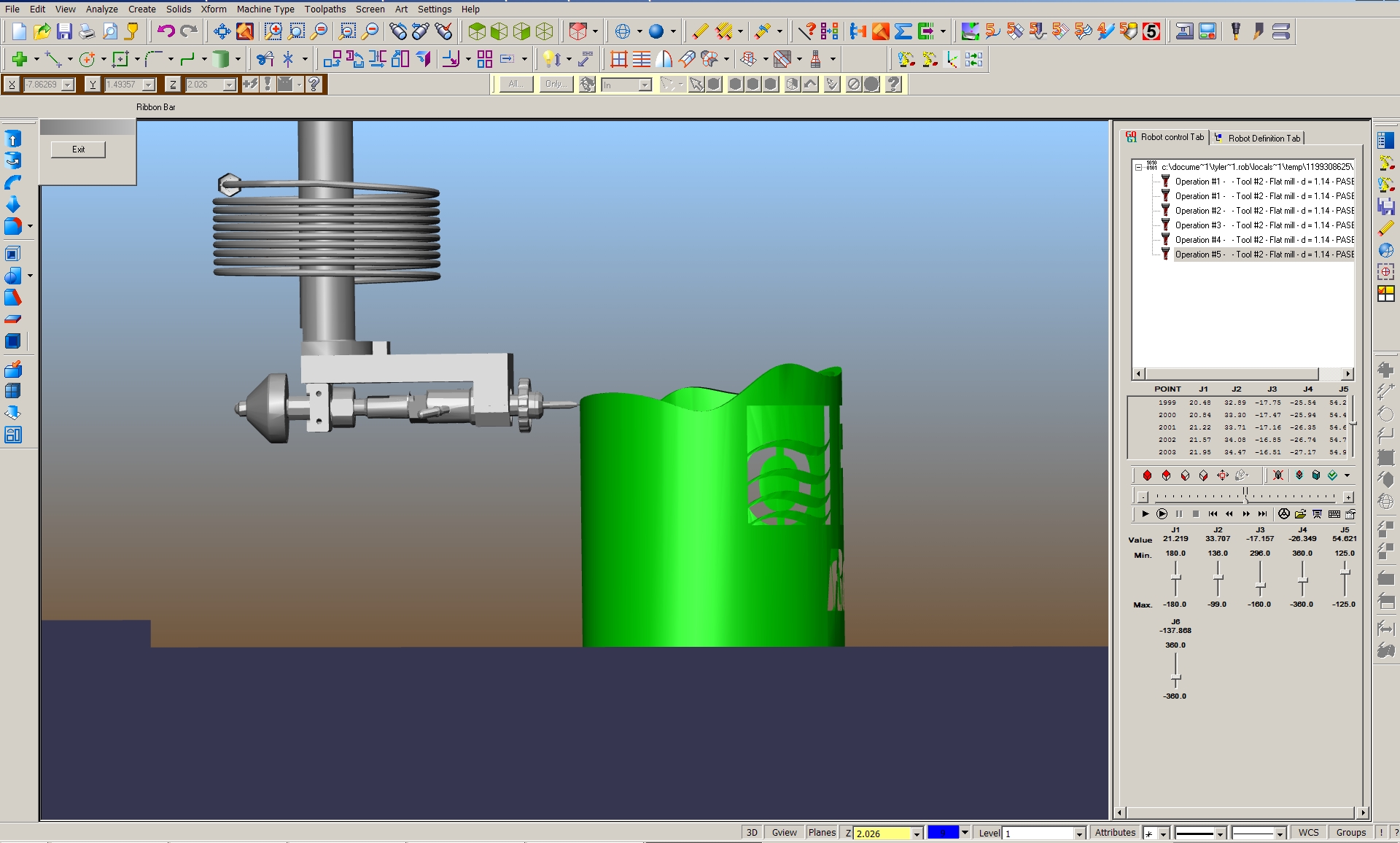
La simulation par robot est proposée avec différentes fonctionnalités utiles, ainsi qu’avec un zoom général, la rotation et le contrôle de lecture, pour une observation parfaite des procédures simulées. Le déplacement simulé des articulations du robot peut être contrôlé dynamiquement ou modifié par l’utilisateur afin de voir les effets du mouvement manuel individuel des articulations. À des fins de présentation ou de partage de données, la routine de simulation complète peut être exportée et fonctionner sur des systèmes sur lesquels Robotmaster n’est pas installé, tout en maintenant l’interface d’affichage principale. La détection de collision est utilisée dans la simulation, avec les collisions spécifiques aux cellules indiquées dans le déplacement des opérations, et une indication graphique de tout composant heurtant. Les collisions avec la géométrie des pièces, les dispositifs de travail ou l’outillage peuvent être modifiées par des déplacements de rétractation sûrs et simulées afin d’assurer que les mesures correctives sont réussies. Une vérification supplémentaire des erreurs est incluse. Les erreurs de singularité, hors de portée et d’extension d’articulation sont calculées à partir de la cinématique robotique spécifique, suspendant tout mouvement de robot dans ce cas.
Souvent, les commandes peuvent consister en des composants qui sont très similaires au chapitre de la conception, des modifications ou des mises à jour effectuées à une pièce. Les profils de configuration peuvent être enregistrés afin de conserver les paramètres de réglage et éliminer les définitions redondantes pour les opérations ou configurations d’outils similaires. Robotmaster prend en charge des robots à six axes des marques Fanuc, ABB, KUKA, Motoman et Staubli. Le développement se poursuit afin de s’étendre à d’autres marques. Voici, sans s’y limiter, des utilisations pour lesquelles Robotmaster est adapté : détourage, soudage, usinage de moule, revêtement par pulvérisation, peinture, polissage, meulage, ébavurage/ébarbage et distribution.
> « Je ne pourrais pas faire mon travail sans ce logiciel. »
Jacob Featherstone est un programmeur CNC pour Armatec Survivability Corporation à London en Ontario, et il utilise Robotmaster quotidiennement : « Sans lui, cela prendrait deux fois plus de temps pour programmer le robot que nous utilisons pour la production. Je peux l’utiliser jusqu’à quatre heures par jour afin de préparer des programmes pour la production ou programmer une pièce prototype, soit le même temps que j’utilise Mastercam. » Après avoir établi la géométrie CAO/FAO, Featherstone utilise Robotmaster afin de configurer et examiner les trajectoires de découpe du robot, pour lesquelles il déclare que la simulation est un avantage clé : « La fonctionnalité la plus utile est la simulation. Une fois que le simulateur est correctement configuré, vous gagnez plusieurs heures dans la préparation du programme pour la machine. » La programmation hors ligne avec Robotmaster fait économiser
plusieurs heures par jour à Armatec pour la programmation des robots. Tout comme les mises à jour de service, un soutien technique constant est toujours à la disposition des utilisateurs : « Je ne pourrais pas faire mon travail sans ce logiciel, et nous sommes très satisfaits du soutien que nous recevons de Robotmaster... Il est très utile et nous procure rapidement des solutions. »
Robotmaster peut également aider les utilisateurs à réaliser un développement de pièce plus précis. « Être capable de créer des trajectoires d’outils directement à partir des modèles CAO solides de notre concepteur a considérablement amélioré l’exactitude de nos composants en fibre de carbone. Avant d’investir dans Mastercam/Robotmaster, nous programmions nos robots à six axes avec la méthode habituelle d’apprentissage manuel. Nous placions simplement un ruban pour le dessin de la pièce à couper, puis nous le tracions. Cela produisait des pièces approximatives par rapport à ce que nous voulions réellement et nécessitait plusieurs essais pour améliorer le programme et se rapprocher de la pièce nominale. » déclare Rick Drulard, ingénieur de procédé chez Ottobock HealthCare. Drulard utilise la programmation hors ligne afin de gérer la production et développer de nouvelles productions ou les faire fonctionner simultanément. La programmation hors ligne avec Robotmaster permet à Ottobock de réduire le temps consacré aux erreurs attribuables à la programmation par apprentissage manuel : « Robotmaster permet l’optimisation de la dynamique des bras. Auparavant, une certaine quantité d’essais et d’erreurs était nécessaire pour minimiser la rotation des articulations durant le passage d’une orientation de buse à une autre (p. ex. la coupe d’un côté de la pièce, puis de l’autre côté). Maintenant, si j’ai un problème relatif à la rotation des articulations, je peux le visualiser dans la simulation, puis le résoudre, hors ligne. » Des problèmes tels que les limites de démarcation de la rotation des articulations peuvent être évités à l’aide de plusieurs options dans Robotmaster : préréglage des valeurs d’origine des articulations, points de repositionnement ou configuration des axes.
Les économies de temps obtenues grâce au logiciel de programmation hors ligne offrent de nouvelles solutions robotiques économiquement viables. Les barrières comme la durée de programmation et de formation peuvent être considérablement réduites grâce à l’utilisation de Robotmaster. C’est pourquoi les sociétés peuvent intégrer en toute confiance des solutions robotiques dans leurs processus lorsque le temps est un facteur. Les employés ayant déjà une expérience de la programmation de machines CNC avec logiciel CAO/FAO peuvent être formés afin de faire fonctionner un robot de façon similaire, particulièrement avec la connaissance de l’interface Mastercam. Les employés sans expérience de CAO/FAO peuvent profiter dune formation CAO/FAO générique avec peu de temps consacré à la formation Robotmaster particulière. Alors que le fonctionnement de robots de niveau expert nécessite des années d’expérience, Robotmaster offre une augmentation immédiate de la productivité cellulaire dans le cas d’un opérateur ne parvenant pas à programmer manuellement le robot.
Alors que plusieurs applications pour robots ont été créées dans l’industrie de la production, un logiciel flexible pris en charge pour la programmation hors ligne, tel Robotmaster, continuera à être un outil nécessaire. La puissance de Robotmaster résulte de la capacité non seulement de disposer d’un système CAO/FAO rassemblant les instructions aux robots, mais de donner à l’utilisateur le contrôle sur la façon dont les instructions sont obtenues à l’aide d’une interface basée sur les paramètres et d’un environnement de simulation. Robotmaster permet aux entreprises industrielles d’utiliser de manière plus productive les ressources robotiques et de fixer la barre pour la concurrence. Les géants de la production ou les ateliers modestes doivent envisager et utiliser des robots dans leur processus de travail. Robotmaster est une nouvelle façon de renforcer la confiance en l’automatisation.