오프라인 프로그래밍 소프트웨어가 우리 제조 환경에 적합할지 어떻게 알 수 있나요?
수년 동안 산업용 로봇은 여러 가지 프로그래밍 방식을 사용해 왔습니다. 가장 눈에 띄는 두 가지는 수동 티칭 펜던트 프로그래밍과 오프라인 프로그래밍(OLP) 소프트웨어입니다.
수동 티칭 펜던트 프로그래밍을 사용하면 로봇 암을 생산 공정에서 분리해야 하며, 원하는 작업의 각 위치를 수동으로 직접 이동시키거나 로봇 컨트롤러를 조작하여 순차적인 프로그램 포인트로 저장해야 합니다. 일반적인 산업용 로봇 프로그램의 경우 이 프로세스를 수십, 수백 번 반복해야 할 수도 있습니다.
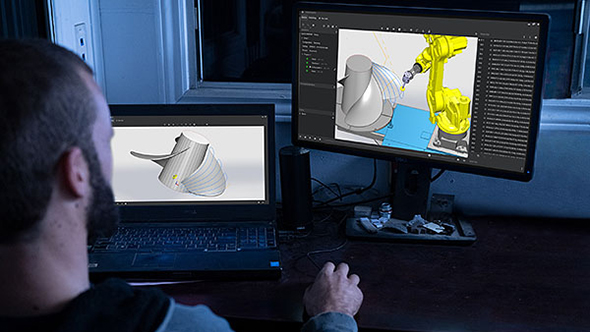
오프라인 프로그래밍 소프트웨어(OLP)를 사용하면 프로그래밍이 컴퓨터에서 실제 로봇과 완전히 독립적으로 이루어지므로 로봇이 생산 상태를 유지할 수 있습니다. 부품의 CAD 모델에서 로봇 궤적을 자동으로 생성하고, 시뮬레이션을 통해 프로그램을 검증하여 오류와 충돌이 없는지 확인할 수 있으며, 생산을 위해 로봇 코드를 출력하거나 나중에 사용할 수 있도록 저장할 수 있습니다.
오프라인 프로그래밍 소프트웨어가 귀사에 적합한지 판단하려면 로봇 공정과 관련된 아래 질문에 답해 보십시오.
프로그래밍 시간이 제조 공정의 병목 현상이 되고 있나요?
프로그래밍을 위해 로봇을 생산에서 제외시켜야 하나요?
프로그래밍하려는 로봇 브랜드가 여러 개인가요?
다품종 소량 생산을 하고 계신가요?
프로그래밍 후 엔지니어링 설계 변경이 이루어지나요?
빠른 부품 교체와 더 빠른 사이클 타임이 최우선 과제인가요?
높은 정확도와 반복성을 최우선으로 생각하시나요?
프로그래밍 시 부품 복잡성이 문제가 되나요?
숙련된 인력 부족 문제를 겪고 계신가요?
로봇의 생산성을 높이고 싶으신가요?
작업에서 발생하는 스크랩과 폐기물의 양을 줄이고 싶으신가요?
이러한 질문 중 하나 이상에 '예'라고 답하셨다면 오프라인 프로그래밍 소프트웨어가 프로그래밍 시간, 오류 및 폐기물을 줄이는 동시에 전반적인 수익성을 개선하는 데 도움이 될 가능성이 높습니다. 귀사의 로봇 애플리케이션에 대한 부담 없는 평가를 진행하시려면 당사에 문의해 주십시오.