四大常见的机器人编程挑战
当制造商寻求将人工密集型手动应用转为自动化时,一个常见的问题是如何对机器人进行编程。
有几种编程方法可用。两种最常见的方法包括示教器编程和离线编程软件。
在示教器方法中,电子控制箱用于对机器人的运动进行编程。机器人移动到每个所需位置,然后将该位置保存为程序中的一个点。输出是采用机器人手臂品牌特定编程语言的程序。
或者,离线编程 (OLP) 软件使用户能够在计算机上独立于硬件对机器人进行编程,而不是将机器人带离生产线。用户导入零件的 CAD 模型,使用软件根据零件轮廓创建路径轨迹,并可在几分钟内生成程序。OLP 软件还通过虚拟/模拟环境提供程序优化和验证,该环境与真实世界的机器人单元相匹配,以确保生成的程序准确错误且无碰撞。
编程方法可能会严重影响投资回报率 (ROI) ,因此为应用找到最佳编程方法对于客户实现最佳结果至关重要。查看编程方法时一些常见的标准包括:
学习曲线
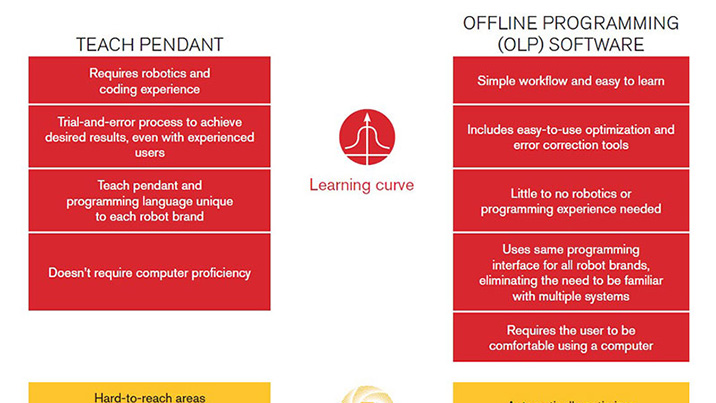
如果机器人编程太难学习,制造商将不愿意进行自动化。编程解决方案需要足够简单,以便当前和未来的员工掌握和理解。
复杂形状
复杂的零件轮廓可能难以复制。编程人员需要确信自己能够在保持准确性的同时一致地再现结果。
多品种、小批量生产运行
在多品种、小批量生产中,编程延迟会对交付时间和利润率产生严重影响。如果是品种多、数量少的零件生产风格,那么编程方法需要适应性强,能够适应根据不同客户要求快速更换零件和周期。
准确性和可重复性
实现一致的结果对于满足客户期望至关重要,尤其是在航空航天等要求非常严格的行业。在选择编程方法时,可重复性可能是需要考虑的重要因素。
 示教器与离线编程 (OLP) 软件
示教器与离线编程 (OLP) 软件自动生成规格:两种编程方法都有其更适合的应用和情况。
一般来说,编程方法使用起来越简单,编程速度就越快。根据零件的复杂性,每种编程方法将花费不同的时间,并带来不同程度的风险。此外,生产风格也会影响编程耗时的关键程度;品种越多、批量越小,使用 OLP 解决方案进行编程的优势就越大。最后,如果获得可重复的结果对业务至关重要,则软件编程解决方案可能是最佳方法。
在为您的机器人选择合适的编程方法时,需要考虑很多因素。OLP 软件并非是适合所有人的解决方案,但对许多人来说是合适的。我们拥有一支专家团队,他们很乐意安排一次简短的探讨性通话,以确定 OLP 软件是否适合您的业务。