Simülasyon, çevrimdışı programlama deneyimini nasıl iyileştiriyor?
Çevrimdışı programlama (OLP) yazılımının güçlü yönlerinden biri, iki güçlü özelliği bir araya getirmesidir: simülasyon ve programlama. Bu iki özellik, robotları çevrimdışı olarak etkili bir biçimde programlamak söz konusu olduğunda iki mükemmel yapboz parçası gibi bir araya geliyor.
Programlama Ortamı
OLP yazılımı, öğretici kumanda yöntemi kullanılarak yapılan programlamada robotun üretimden çıkarılması yerine kullanıcının robotu donanımdan bağımsız olarak bilgisayarda programlamasına olanak verir. Yazılım, parçanın CAD modelini içe aktararak yol yörüngelerini otomatik olarak oluşturabilir ve programı dakikalar içinde oluşturabilir.
Simülasyon Ortamı
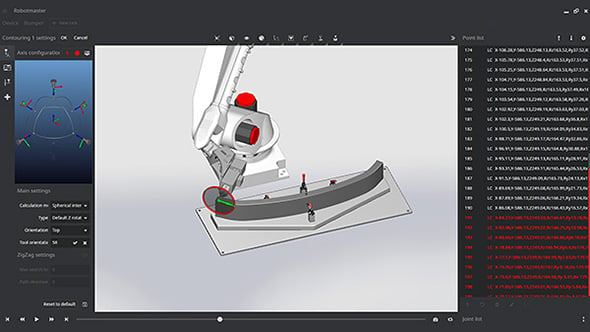
OLP yazılımı kullanıldığında, gerçek dünyadaki robotik sistemin sanal bir kopyası oluşturulur. Buna robotun sanal bir modeli, takımlar, güvenlik rayları, sehpalar, pozisyonlayıcılar ve gerçek dünyadaki robot hücresinde bulunan diğer her şey dâhildir.
Çevrimdışı Programlama ve Simülasyon Yazılımı
Kullanıcı, programın sonucunu görebildiği ve programın çarpışmalar, mafsal veya erişim sınırları ya da robotik kolun hareketini kısıtlayan yapılandırmalar gibi robotik hatalar içermediğini görsel olarak doğrulayabildiği için bu iki ortam bir araya geldiğinde güçlü programlama özellikleri daha da gelişmiş olur.
Bu güçlü görselleştirme, kullanıcının istenen sonuçlar elde edilene kadar proses ayarlarında kolayca ayarlamalar yapmasına olanak tanır. Güçlü bir çevrimdışı programlama yazılımı, programdaki robotik hataları ortadan kaldırmak için kullanıcıya görsel ipuçları ile yol gösterir.
Simülasyon özelliği olmayan bir programlama yazılımı, programı başarıyla oluşturmak için kullanıcının robot kodu uzmanı olmasını gerektirir. Bu, programı gerçek dünyada çalıştırmadan önce doğrulama sürecini çok zor ve zaman alıcı hâle getirir. Her robot markası farklı bir programlama dili kullanır ve kullanıcının robot kodunu yetkin bir şekilde yazmak ve düzenlemek için bu dillerin her birini iyi bilmesi gerekir.
Simülasyon, OLP içindeki programlama motorunu tamamlayan güçlü bir araçtır. Robotmaster gibi güçlü bir OLP yazılımı bunu bir adım daha ileriye taşır. Ters kinematik motor simülatörünü kullanan kullanıcılar sadece programlarının simülasyonunu görmekle kalmaz, aynı zamanda programı hızlandırabilir, geri veya ileri sarabilir. Bunu okuyan yazılım dışı geliştiricilere sesleniyorum - Arka planda gerçekleşen tüm hesaplamaları ve işlemleri göz önünde bulundurmanızı rica ediyorum. OLP yazılımında gösterilenler sadece programın bir animasyonu değil, hücre bileşenlerinden, takımlardan, proses parametrelerinden, robot sınırlamalarından ve parça geometrisinden elde edilen verilerin toplanmasıyla oluşturulan bir görselleştirmedir.
Simülasyon hızlandırıldığında programlama hesaplamaları da hızlanır. Tüm OLP yazılımlarının bu hızlı hesaplama hızlarını sağlayamayacağı unutulmamalıdır. Çoğu yazılım, simülasyonun başlangıçtan bitişe kadar tek bir hızda oynatılmasını gerektirir ancak bu esneklik uzun programları incelerken zamandan tasarruf sağlar veya kullanıcının bir programda ayarlamaların yapıldığı bölüme hızlıca gitmesine imkân verir verir. Günün sonunda çevrimdışı programlama yazılımının amacı programlama süresini azaltmaktır, dolayısıyla doğrulama süreci ne kadar hızlı olursa program o kadar hızlı tamamlanır ve üretime hazır olur.
Gerçek dünyada gerçekleştirmeden önce süreci doğrulayabilmek, teyit edebilmek veya simüle edebilmek, programın herhangi bir çarpışma veya program hatası olmadan istenen sonuçları vermesi için hayati önem taşır.
Bu mükemmel ikili, robotik veya kodlama uzmanı olmaksızın robotları programlamak isteyenler için harika bir araçtır. Öte yandan, robotik sistemleri tasarlayanlar için de değerli bir araçtır. Bir OLP yazılımı kullanarak parça üzerinde görevi programlayabilir ve ardından robotun görevi programlandığı gibi gerçekleştirmesi için hangi hücre düzenlerinin ve bileşenlerin gerekli olduğunu görmek için bu programı simülasyon ortamına getirebilirler. Bir entegratör, programda veya hücre tasarımında kolayca ayarlamalar yapabilir ve bunların çalışıp çalışmayacağını görselleştirebilir. Bu nedenle, robot entegratörleri yazılımı bir tasarım, doğrulama ve satış aracı olarak kullanır. Programcılar hücre yapılandırmalarını hızlı bir şekilde değerlendirebilir, potansiyel çarpışmaları tespit edebilir ve erişim çalışmaları gerçekleştirebilir, böylece tasarım ve otomasyon sürecinin erken aşamalarında sorunları keşfedebilirler.
En iyi çevrimdışı programlama yazılımı, programlama ve simülasyonu sorunsuz bir şekilde birleştiren yazılımdır. Programın oluşturulması ve prosesin simüle edilmesi aynı platformda yapıldığı için program optimizasyonu deneme-yanılma yoluyla değil otomatik olarak yapılır, bu da para ve kaynak tasarrufu sağlar.