Como a simulação melhora a experiência de programação off-line
Um dos pontos fortes do software de programação off-line (OLP) é que ele combina duas capacidades poderosas: simulação e programação. Essas duas capacidades se encaixam como duas peças de puzzle perfeitas quando se trata de programar robôs off-line de forma eficaz.
Ambiente de programação PLC
O software OLP permite ao usuário programar o robô em um computador, independentemente do hardware, em vez de retirar o robô da produção, o que é o caso ao programar usando o método de teach pendant. Ao importar um modelo CAD da peça, o software pode gerar automaticamente as trajetórias do caminho e criar o programa em minutos.
Ambiente de simulação
Ao usar um software OLP, é criada uma cópia virtual do sistema robótico do mundo real. Isso inclui um modelo virtual do robô, ferramentas, trilhos de segurança, mesas, posicionadores e tudo o mais que existe na célula robótica do mundo real.
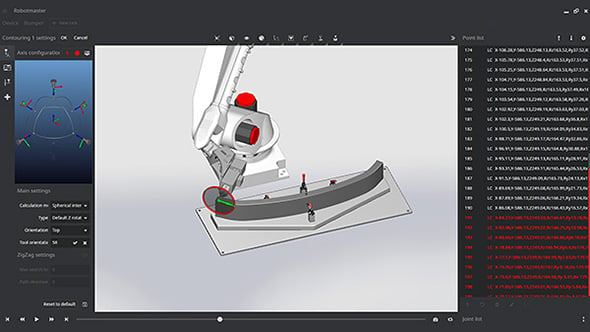
Software de Programação e Simulação off-line
Ao sobrepor esses dois ambientes juntos, as poderosas capacidades de programação são ainda melhoradas, pois o usuário pode ver o resultado do programa e é capaz de validar visualmente que o programa está livre de erros robóticos, como colisões, limites de junta ou alcance, ou singularidades, configurações que restringem o movimento do braço robótico.
Essa visualização poderosa permite que o usuário faça ajustes facilmente nos ajustes do processo até que os resultados desejados sejam alcançados. O poderoso software de programação off-line guiará o usuário com pistas visuais para eliminar quaisquer erros robóticos no programa.
Um software de programação sem as capacidades de simulação exigiria que o usuário seja um especialista em código de robô para criar um programa com sucesso. Isso tornaria o processo de validação de um programa antes de executá-lo no mundo real muito desafiador e demorado. Cada marca de robô usa uma linguagem de programação diferente, exigindo que o usuário seja muito fluente em cada um desses idiomas para escrever e editar o código do robô de forma competente.
A simulação é uma ferramenta poderosa que complementa o motor de programação no OLP. O poderoso software OLP, como o Robotmaster, leva isso um passo mais além. Usando um simulador de motor de cinemática reversa, os usuários não só podem ver a simulação de seu programa, como também podem acelerar, rebobinar ou avançar rapidamente pelo programa. Para os desenvolvedores que não são de software que estão lendo isso — eu insisto que você considere todos os cálculos e processamentos que estão acontecendo em segundo plano. O que é demonstrado no software OLP não é apenas uma animação do programa, mas sim uma visualização criada pela coleta de dados disponíveis dos componentes da célula, ferramentas, parâmetros de processo, limitações do robô e geometria da peça.
Quando a simulação é acelerada, os cálculos de programação também o são. É importante notar que nem todo o software OLP consegue lidar com essas velocidades rápidas de cálculo. A maioria dos softwares exige que a simulação seja reproduzida de partidas até o fim em uma velocidade, no entanto, essa flexibilidade economiza tempo ao revisar programas longos ou permitir que o usuário avance rapidamente através de um programa para a seção onde estão sendo feitos ajustes. No final do dia, o objetivo do software de programação off-line é reduzir o tempo de programação, de modo que quanto mais rápido o processo de validação, mais rápido o programa estará completo e pronto para a produção.
A capacidade de validar, verificar ou simular o processo antes de executá-lo no mundo real é vital para garantir que o programa produza os resultados desejados, sem quaisquer colisões ou erros de programa.
Este par perfeito é uma ótima ferramenta para aqueles que querem programar robôs sem serem especialistas em robótica ou codificação. No entanto, também é uma ferramenta valiosa para aqueles que projetam sistema robótico. Usando um software OLP, eles podem programar a tarefa na peça e, em seguida, trazer esse programa para o ambiente de simulação para ver quais layouts de célula e componentes são necessários para que o robô realize a tarefa conforme programado. Um integrador pode facilmente fazer ajustes ao programa ou design da célula e visualizar se isso funcionará. Por essa razão, os integradores de robôs o usam como uma ferramenta de design, validação e vendas. Os programadores podem avaliar rapidamente as configurações das células, detectar colisões potenciais e realizar estudos de alcance, para que descubram problemas no início do processo de projeto e automação.
O melhor software de programação off-line combina perfeitamente programação e simulação. Ao gerar um programa e simular o processo dentro da mesma plataforma, a otimização do programa é feita automaticamente em vez de por tentativa e erro, o que economiza dinheiro e recursos.