Główne trendy w oprogramowaniu do programowania robotów offline: Prostota, dostępność i symulacja
W świecie robotyki, programowanie offline (OLP) pokonało długą drogę w krótkim czasie, a globalna pandemia zapoczątkowała więcej innowacji. Roboty przemysłowe ewoluowały od złożonych robotów montażowych do robotów współpracujących („cobotów”), które pracują ramię w ramię ze swoimi ludzkimi partnerami. Wraz z postępem technologicznym branża doświadcza wielu zmian i udoskonaleń w zakresie OLP.
Wcześniej przyjrzeliśmy się takim trendom, jak wszechstronność i inteligentne maszyny oraz ich wpływowi na świat robotyki i OLP. W tym artykule przyjrzymy się znaczeniu prostoty, dostępności i możliwości symulacji.
Proste i dostępne
Na rynku dostępnych jest kilka rozwiązań OLP, z których każde ma różne mocne strony. Oprogramowanie do programowania offline Robotmaster® zawsze dążyło do stworzenia wydajnego rozwiązania do programowania robotów, które byłoby jednocześnie jak najbardziej przyjazne dla użytkownika. Każdy element oprogramowania musi mieć swój cel, a użytkownicy powinni mieć możliwość swobodnego korzystania z niego, niezależnie od poziomu doświadczenia w zakresie robotyki. Użytkownicy nie muszą być ekspertami w dziedzinie robotyki lub CAD/CAM, aby korzystać z oprogramowania OLP.
Jednym ze sposobów zapewnienia pozytywnych doświadczeń użytkownika było zastosowanie otwartej/elastycznej architektury, która pozwala użytkownikom korzystać z tego, co najlepsze z obu światów, zapewniając korzyści ze standardowych funkcji, jednocześnie umożliwiając dostosowanie niektórych funkcji do ich unikalnych wyzwań.
Symulacja
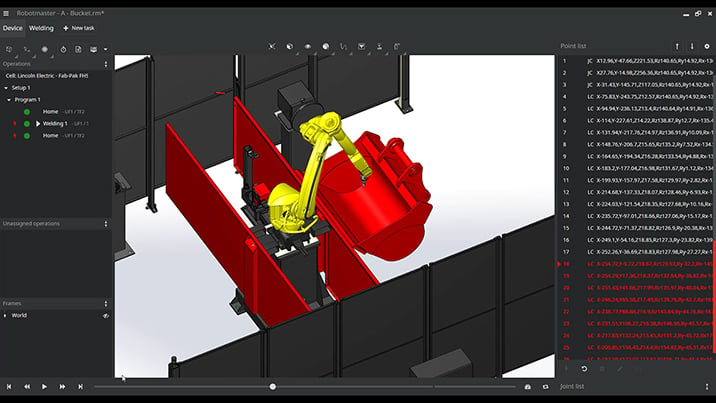
Jedną z zalet OLP i CAD jest tworzenie, testowanie, regulacja i szkolenie robota wirtualnie, zanim zostanie on zainstalowany w fabryce. Postępy w rzeczywistości rozszerzonej i wirtualnej będą w dalszym ciągu przekraczać granice, a OLP będzie musiało dotrzymać temu kroku. Osobliwości i ograniczenia przegubów mogą być identyfikowane i rozwiązywane w środowisku symulacji, zanim robot będzie zainstalowany. Obszary podatne na błędy kinematyczne mogą być przewidywane i optymalizowane podczas projektowania komórki robotycznej przed instalacją.
Użytkownicy będą w dalszym ciągu poszukiwać ulepszeń, takich jak interfejs użytkownika, który zapewnia programiście graficzną informację zwrotną. Dane w czasie rzeczywistym są kluczem do odpowiedzi na często zadawane pytania, takie jak „Czy ścieżka robota jest dobra do wykonania” lub „Dlaczego napotkałem problemy ze ścieżką, takie jak osobliwości i kolizje, lub napotkałem ograniczenia zasięgu wymagające edycji?”
Im więcej kalibracji można wykonać przed instalacją, tym szybciej i wydajniej można zakończyć i uruchomić integrację robota.
Dowiedz się więcej
Chcesz dowiedzieć się więcej o OLP? Dowiedz się więcej o programowaniu robotów offline.
Robotmaster®, marka Hypertherm, jest oprogramowaniem do programowania robotów offline, które pomaga producentom maksymalizować produktywność w seriach produkcyjnych o dowolnej wielkości. Dzięki zintegrowanej funkcjonalności CAD/CAM oprogramowanie Robotmaster sprawia, że programowanie części o dowolnej złożoności jest szybkie i łatwe. To intuicyjne i wydajne rozwiązanie zostało zaprojektowane z myślą o ekspertach ds. procesów, co zmniejsza zapotrzebowanie na programistów i wiedzę z zakresu robotyki.