4つの一般的なロボットプログラミングの課題
製造業者が手作業中心の労働集約的なプロセスを自動化に移行する際、よく挙がる懸念の一つは、ロボットをどのようにプログラミングするかということです。
利用可能なプログラミング方法はいくつかあります。最も一般的な方法の2つは、ティーチペンダントプログラミングとオフラインプログラミングソフトウェアです。
ティーチペンダント方式では、電子制御ボックスを使用してロボットの動きをプログラムします。ロボットは各希望の位置に移動し、プログラムのポイントとして保存されます。出力は、ロボットアームのブランド固有のプログラミング言語のプログラムです。
一方、オフラインプログラミング(OLP)ソフトウェアを使用すると、ユーザーはロボットを生産ラインから離すことなく、ハードウェアから独立してコンピュータ上でロボットをプログラミングすることができます。ユーザーは部品のCADモデルをインポートし、ソフトウェアを使用して部品の形状に基づいてパス軌道を設定し、数分でプログラムを生成できます。OLPソフトウェアは、現実のロボットセルと一致する仮想/シミュレーション環境を通じて、生成されたプログラムがエラーや衝突のないことを確認するためのプログラムの最適化と検証を提供します。
プログラミング方法は投資利益率(ROI)に大きな影響を与えるため、アプリケーションに最適なプログラミング手法を見つけることは、顧客が最良の結果を得るために極めて重要です。プログラミング方法を検討する際の一般的な基準には、次のようなものがあります:
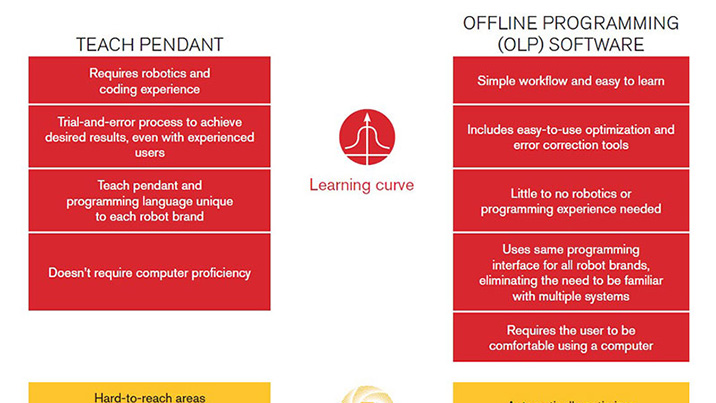
学習曲線
ロボットのプログラミングを学ぶのが難しすぎると、製造業者は自動化に消極的になるでしょう。プログラミングソリューションは、現在および将来の従業員が把握し、理解するのに十分なほど容易でなければなりません。
複雑な形状
複雑な部品の形状は再現が困難です。プログラマーは、正確性を維持しつつ、結果を常に再現できるという自信を持つ必要があります。
多品種少量生産
多品種少量生産の場合、プログラミングの遅延は納期と利益に重大な影響を及ぼす可能性があります。さまざまな部品を少量ずつ生産する生産スタイルの場合、部品を迅速に変更し、さまざまな顧客の要求に対応できるようにプログラミング方法を適応させる必要があります。
精度と繰り返し性
特に航空宇宙産業などの非常に厳しい要件のある業界では、一貫した結果を達成することが顧客の期待に応える上で非常に重要です。繰り返し性は、プログラミング方法を選択する際に考慮すべき重要な要素です。
 ティーチペンダント対オフラインプログラミング(OLP)ソフトウェア
ティーチペンダント対オフラインプログラミング(OLP)ソフトウェア両方のプログラミング方法には、それぞれに適した用途や状況があります。
一般的に、プログラミング方法が簡単であればあるほど、プログラミングが速くなります。部品の複雑さに応じて、各プログラミング方法には異なる時間がかかり、異なる程度のリスクが伴います。さらに、生産スタイルはプログラミング時間の重要性にも影響します。混合率が高く、ボリュームが低いほどOLPソリューションを使用したプログラミングのメリットは高くなります。最後に、事業にとって繰り返し可能な結果を達成することが不可欠な場合は、ソフトウェアプログラミングソリューションが最善の方法となる可能性があります。
ロボットに適したプログラミング方法を選択する際には、多くの要因を考慮する必要があります。OLPソフトウェアは、すべての人にとって最適なソリューションではありませんが、多くの人にとって適切なソリューションです。OLPソフトウェアがお客様の事業に適しているかどうかを判断するために、専門家チームが短い調査コールをスケジュールします。