オフラインプログラミングとは?
オフラインプログラミング(OLP)またはオフラインロボットプログラミング(OLRP)ソフトウェアは、ユーザーがロボットコントローラではなくソフトウェアを使用してコンピュータから産業用製造ロボットをプログラミングすることを可能にするロボットプログラミング方法です。この方法を使用すると、コンピュータソフトウェアを使用してプログラムを生成しながら、ロボットを生産し続けることができます。これにより、ロボットのダウンタイムが大幅に削減され、生産効率が向上し、コストが削減されます。
世界中の製造施設は、生産性を最大化し、競争力を維持するために自動化を採用しています。製造ロボットには高い精度と一貫した生産など、多くの利点があり、手動でプロセスを完了するよりもはるかに優れた投資回収率を実現します。ロボットには、プログラミングに関しては欠点があります。ほとんどのケースで、更新やプログラミングを行うためにはオフライン状態にする必要があり、これにより生産の遅延や売上損失が発生する可能性があります。
オフラインプログラミングの仕組み
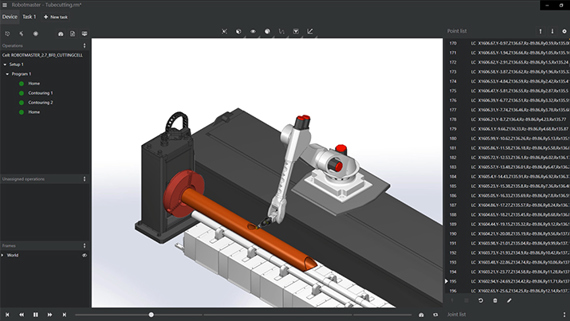
OLPソフトウェアは3D CADモデルと連携して、パス計画、プログラミング、エンジニアリングなどのタスクを定義します。
OLP環境は、ロボットワークセルの3D CADモデルを使用します。すべてのプログラミングはバーチャルスペースで完了するため、ロボットが設置される前にトラブルシューティングと問題解決が可能になります。OLP環境でプログラムを作成、シミュレーション、編集できるため、ロボットは必要に応じて動作します。ロボットコードが生成されると、ロボットにアップロードされます。
オフラインプログラミングとティーチペンダントプログラミングの主な利点
ロボットの迅速な統合
新規設置でも再導入でも、時間は常に不可欠な要素です。仮想環境でプログラミングを作成、調整、テストすることで、ロボットが設置されたらすぐに操作できるようになり、ティーチペンダントと比較して数日または数週間を節約できます。
ダウンタイムなし
ティーチペンダントプログラミングでは、ロボットはティーチモードでなければなりません。OLPは、稼働中にロボットにプログラミングをアップロードできるため、製造の遅延が少なくなります。
安全
ロボット構成による安全性の懸念に直面した場合でも、在宅勤務プロトコルによるロボットへのアクセス制限の場合でも、OLPは安全な場所にあるノートパソコンから完了し、ティーチペンダントにアクセスすることなくロボットにアップロードできます。
すばやく交換が可能
OLPは、パートAの実行を完了している間にパートB用のロボットをプログラミングできます。パートAが完了するとすぐに、パートBのプログラミングをアップロードし、ロボットの電源を切らずにタスクを開始できます。OLPはサイクルタイムを短縮し、より迅速な移行でより多くのジョブの混合を可能にします。
汎用的なアプリケーション
製造工程において、特定のブランドへの忠誠心を示し、1つのブランドのロボットのみを使用するケースはほとんどありません。ほとんどの場合、最適な価格でタスクを完了するロボットが設置されるため、さまざまなロボットをプログラミングする必要があります。真のOLPソフトウェアは「ロボットに依存しない」必要があります。つまり、さまざまなロボットブランドのコードを生成できます。
使いやすさ
適切なOLPにはプロセス知識が必要ですが、高度なプログラミングやロボット工学の専門知識は必要ありません。OLPはユーザーを中心に構築されており、クリーンでエレガントなユーザーエクスペリエンスを提供するように設計されています。さらに、さまざまなブランドのロボットとインターフェース接続できるため、プログラマーは各OEMロボットブランドの独自のOEMインターフェースを学ぶ必要はありません。
新しい構成のテスト
ロボットを製造業務に追加することは、大きな資本投資です。OLPソフトウェアは、ロボットを設置する前にユーザーが3Dシミュレーションでさまざまな構成を設計およびテストできる直感的なユーザーインターフェースを備えている必要があります。ロボットが到着する前に問題を設計、特定、解決します。