Come la simulazione migliora la programmazione offline
Uno dei punti di forza del software di programmazione offline (OLP) è che combina due potenti funzionalità: simulazione e programmazione. Queste capacità si integrano perfettamente per programmare efficacemente i robot offline.
Ambiente di programmazione
Il software OLP consente di programmare il robot su computer, indipendentemente dall’hardware, evitando di sottrarre il robot alla produzione, come avviene con il metodo del teach pendant. Importando un modello CAD del pezzo, il software può generare automaticamente le traiettorie e creare il programma in pochi minuti.
Ambiente di simulazione
Quando si utilizza un software OLP, viene creata una copia virtuale del sistema robotico reale. Ciò include un modello virtuale del robot, degli utensili, delle guide di sicurezza, dei tavoli, dei posizionatori e di qualsiasi altro elemento presente nella cella robotizzata reale.
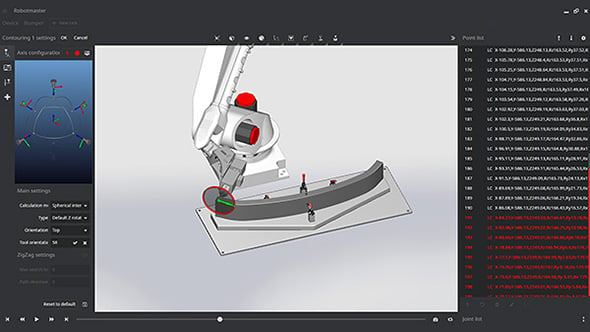
Software di programmazione e simulazione offline
Sovrapponendo ambiente di programmazione e simulazione, le capacità di programmazione vengono ulteriormente potenziate: l’utente può vedere il risultato del programma e verificare visivamente l’assenza di errori robotici come collisioni, limiti di giunto o raggio, singularità o configurazioni che limitano il movimento del braccio robotico.
Questa visualizzazione consente di effettuare facilmente le regolazioni necessarie fino al raggiungimento dei risultati desiderati. Un software OLP avanzato guiderà l’utente con segnali visivi per eliminare eventuali errori robotici nel programma.
Senza simulazione, l’utente dovrebbe essere esperto di programmazione robotica, rendendo la convalida di un programma prima della sua esecuzione nel mondo reale molto complessa e dispendiosa in termini di tempo. Ogni marca di robot utilizza un linguaggio di programmazione differente; l’utente dovrebbe conoscere ogni linguaggio per scrivere e modificare correttamente il codice.
La simulazione integra il motore di programmazione OLP. Un software avanzato come Robotmaster va oltre: utilizzando un simulatore cinematico inverso, gli utenti possono visualizzare la simulazione, accelerare, riavvolgere o avanzare rapidamente attraverso il programma. Anche per chi non è sviluppatore software, è importante comprendere tutti i calcoli e le elaborazioni che avvengono in background. Ciò che viene visualizzato nel software OLP non è solo un’animazione, ma una vera rappresentazione dei dati provenienti dai componenti della cella, dagli utensili, dai parametri di processo, dai limiti del robot e dalla geometria del pezzo.
Quando la simulazione viene accelerata, anche i calcoli di programmazione procedono più velocemente. È importante notare che non tutto il software OLP è in grado di gestire queste elevate velocità di calcolo. La maggior parte dei software richiede che la simulazione venga riprodotta dall’inizio alla fine a un’unica velocità; questa flessibilità, invece, permette di risparmiare tempo nella revisione di programmi lunghi o di avanzare rapidamente fino alla sezione in cui vengono apportate le modifiche. In definitiva, l’obiettivo del software di programmazione offline è ridurre i tempi di programmazione: più rapido è il processo di convalida, più velocemente il programma sarà completato e pronto per la produzione.
La possibilità di convalidare, verificare o simulare il processo prima di eseguirlo nel mondo reale è fondamentale per garantire che il programma produca i risultati desiderati, senza collisioni né errori.
Questa combinazione perfetta è uno strumento ideale per chi desidera programmare robot senza essere esperto di robotica o di linguaggi di programmazione. È tuttavia anche uno strumento prezioso per chi progetta sistemi robotici. Utilizzando un software OLP, è possibile programmare l’operazione sul pezzo e importare il programma nell’ambiente di simulazione per verificare quali layout di cella e componenti siano necessari affinché il robot esegua l’attività come previsto. Un integratore può facilmente apportare modifiche al programma o al design della cella e verificare subito se funzionerà. Per questo motivo, gli integratori di robotica lo utilizzano come strumento di progettazione, validazione e persino di supporto alle vendite. I programmatori possono valutare rapidamente le configurazioni delle celle, individuare potenziali collisioni ed eseguire studi di accessibilità, così da rilevare eventuali problemi già nelle prime fasi del processo di progettazione e automazione.
Il miglior software di programmazione offline integra perfettamente programmazione e simulazione. Generando un programma e simulando il processo all’interno della stessa piattaforma, l’ottimizzazione avviene automaticamente anziché per tentativi ed errori, con un notevole risparmio di tempo e risorse.