Che cos'è la programmazione offline?
Il software di Offline Programming (OLP) o Offline Robot Programming (OLRP) è un metodo di programmazione robotica che consente di programmare il robot industriale direttamente da un computer, senza utilizzare il controller del robot. Grazie a questo metodo, i produttori possono mantenere il robot in produzione mentre i programmi vengono generati tramite software. Ciò riduce drasticamente i tempi passivi del robot, aumenta l'efficienza produttiva e consente di risparmiare sui costi.
Gli stabilimenti di produzione in tutto il mondo stanno adottando l'automazione per massimizzare la produttività e rimanere competitivi. I robot industriali offrono numerosi vantaggi, come elevata precisione e produzione costante, che si traducono in un ROI significativamente migliore rispetto ai processi eseguiti manualmente. Tuttavia, i robot presentano un limite: per essere aggiornati o programmati, devono spesso essere offline, comportando ritardi nella produzione e perdite economiche.
Come funziona la programmazione offline?
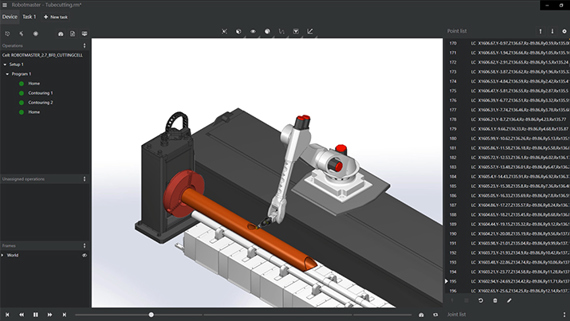
Il software OLP utilizza modelli CAD 3D per definire attività quali la pianificazione dei percorsi, la programmazione e l’ingegneria.
L’ambiente OLP utilizza un modello CAD 3D della cella robotizzata. Tutta la programmazione avviene in uno spazio virtuale, consentendo di individuare e risolvere eventuali problemi prima dell’installazione del robot. I programmi possono essere creati, simulati e modificati nell’ambiente OLP, garantendo che il robot esegua le operazioni previste. Una volta generato, il codice viene trasferito sul robot.
Vantaggi principali della programmazione offline rispetto alla programmazione con teach pendant
Integrazione più rapida dei robot
Che si tratti di una nuova installazione o di una riallocazione, il tempo resta sempre un fattore cruciale. Creando, modificando e testando la programmazione in un ambiente virtuale, il robot risulta pronto all’uso al momento dell’installazione, risparmiando giorni o settimane rispetto all’impiego di una pulsantiera teach.
Nessun tempo passivo
Con la programmazione tramite teach pendant, il robot deve trovarsi in modalità teach. Con l’OLP, è possibile caricare la programmazione su un robot mentre è operativo, riducendo così i tempi di inattività nella produzione.
Sicurezza
Che si tratti di un problema di sicurezza legato alla configurazione del robot o di un accesso limitato al robot a causa dei protocolli di lavoro da remoto, l’OLP può essere completato da un computer portatile in un luogo sicuro e caricato sul robot senza necessità di utilizzare il teach pendant.
Sostituzioni rapide
L’OLP può programmare un robot per la parte B mentre viene completato il ciclo della parte A. Non appena la parte A è completata, la programmazione della parte B può essere caricata e il lavoro avviato senza spegnere il robot. L’OLP consente tempi di ciclo più rapidi, permettendo una maggiore varietà di lavorazioni e transizioni più veloci.
Utilizzo universale
Poche realtà produttive attribuiscono importanza alla fedeltà a un marchio, utilizzando un solo robot di quel marchio. Nella maggior parte dei casi si installa il robot che svolge il compito al miglior rapporto qualità-prezzo, portando alla necessità di programmare robot di marche diverse. Un vero software OLP deve essere “agnostico” rispetto al robot, cioè in grado di generare codice per robot di diversi marchi.
Semplicità d’uso
La giusta OLP richiede conoscenze del processo, ma non necessita di competenze avanzate di programmazione o robotica. OLP è progettata attorno all’utente, offrendo un’esperienza semplice, chiara ed elegante. Inoltre, grazie alla possibilità di interfacciarsi con diversi robot OEM, i programmatori non devono imparare le interfacce proprietarie di ciascun produttore.
Test di nuove configurazioni di sistema
L’inserimento di un robot nel tuo processo produttivo rappresenta un investimento di capitale importante. Il software OLP deve offrire un’interfaccia intuitiva che permetta di progettare e testare diverse configurazioni tramite simulazione 3D prima dell’installazione del robot. Progetta, individua e risolvi eventuali problemi prima dell’arrivo del robot.