Comment la simulation améliore l’expérience de programmation hors ligne
L’un des points forts du logiciel de programmation hors ligne (PHL) est qu’il combine deux capacités puissantes : simulation et programmation. Ces deux capacités s’imbriquent parfaitement lorsqu’il s’agit de programmer efficacement des robots hors ligne.
Environnement de programmation
Le logiciel de PHL permet à l’utilisateur de programmer le robot sur un ordinateur, indépendamment du matériel, plutôt que de le sortir de la production, ce qui est le cas lors de la programmation avec le boîtier d’apprentissage. En important un modèle CAO de la pièce, le logiciel peut générer automatiquement les trajectoires de parcours et créer le programme en quelques minutes.
Environnement de simulation
Lors de l’utilisation d’un logiciel de PHL, une copie virtuelle du système robotisé réel est créée. Cela inclut un modèle virtuel du robot, de l’outillage, des rails de sécurité, des tables, des positionneurs et tout ce qui existe dans la cellule robotisée réelle.
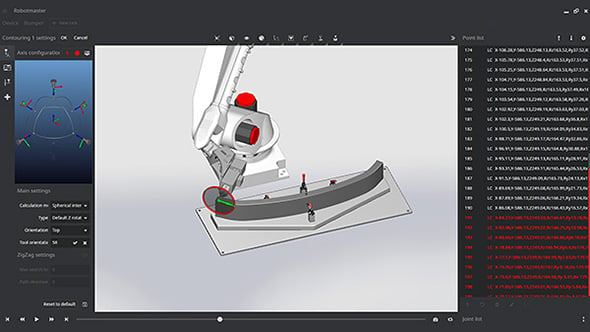
Logiciel de programmation et de simulation hors ligne
En superposant ces deux environnements, les puissantes capacités de programmation sont encore améliorées, car l’utilisateur peut voir le résultat du programme et vérifier visuellement que celui-ci ne comporte pas d’erreurs robotiques telles que des collisions, des limites d’axes ou de portée, ou des singularités, configurations qui restreignent le mouvement du bras robotique.
Cette visualisation puissante permet à l’utilisateur d’ajuster facilement les paramètres du processus jusqu’à l’obtention des résultats souhaités. Un puissant logiciel de programmation hors ligne guide l’utilisateur avec des indices visuels pour éliminer toute erreur robotique dans le programme.
Un logiciel de programmation sans capacités de simulation exigerait que l’utilisateur soit un expert en code robotique pour réussir à créer un programme. Cela compliquerait considérablement le processus de validation d’un programme avant son exécution dans le monde réel et prendrait beaucoup de temps. Chaque marque de robot utilise un langage de programmation différent, ce qui exige que l’utilisateur maîtrise parfaitement chacune de ces langues pour écrire et modifier le code du robot.
La simulation est un outil puissant qui complète le moteur de PHL. Un puissant logiciel de PHL, tel que Robotmaster, va encore plus loin. Grâce à un simulateur à cinématique inverse, les utilisateurs peuvent non seulement voir la simulation de leur programme, mais aussi accélérer, revenir en arrière ou avancer rapidement dans le programme. À l’attention des lecteurs qui ne sont pas développeurs de logiciels, il convient de prendre en considération tous les calculs et traitements qui s’effectuent en arrière-plan. Ce qui est démontré dans le logiciel de PHL n’est pas seulement une animation du programme, mais plutôt une visualisation créée en rassemblant les données disponibles à partir des composants de la cellule, de l’outillage, des paramètres de processus, des limitations du robot et de la géométrie de la pièce.
Lorsque la simulation est accélérée, les calculs de programmation le sont également. Il est important de noter que tous les logiciels de PH ne sont pas capables de gérer ces vitesses de calcul rapides. La plupart des logiciels exigent que la simulation soit jouée du début à la fin à une seule vitesse, mais cette flexibilité permet de gagner du temps lors de la révision de programmes longs ou permet à l’utilisateur d’avancer rapidement dans un programme jusqu’à la section où des réglages sont effectués. En fin de compte, l’objectif des logiciels de programmation hors ligne est de réduire le temps de programmation. Ainsi, plus le processus de validation est rapide, plus le programme sera prêt rapidement pour la production.
La capacité à valider, vérifier ou simuler le processus avant de l’exécuter dans le monde réel est essentielle pour s’assurer que le programme produira les résultats souhaités, sans collisions ni erreurs de programme.
Ce duo parfait est un outil idéal pour ceux qui souhaitent programmer des robots sans être experts en robotique ou en codage. Cependant, il s’agit également d’un outil précieux pour ceux qui conçoivent des systèmes robotisés. À l’aide d’un logiciel de PHL, ils peuvent programmer la tâche sur la pièce, puis amener ce programme dans l’environnement de simulation pour voir quelles configurations de cellule et quels composants sont nécessaires pour que le robot effectue la tâche comme programmé. Un intégrateur peut facilement apporter des réglages au programme ou à la conception de la cellule et visualiser si cela fonctionnera. C’est pourquoi les intégrateurs robotiques l’utilisent comme outil de conception, de validation et de vente. Les programmeurs peuvent rapidement évaluer les configurations des cellules, détecter les collisions potentielles et effectuer des études de portée, ce qui leur permet de détecter les problèmes dès le début du processus de conception et d’automatisation.
Le meilleur logiciel de programmation hors ligne allie parfaitement programmation et simulation. En générant un programme et en simulant le processus au sein de la même plateforme, l’optimisation du programme s’effectue automatiquement plutôt que par essais et erreurs, ce qui permet d’économiser de l’argent et des ressources.