Cómo la simulación mejora la experiencia de programación fuera de línea
Una de las fortalezas del software de programación fuera de línea (OLP) es que combina dos potentes capacidades: simulación y programación. Estas dos capacidades encajan como dos piezas perfectas de un rompecabezas cuando se trata de programar eficazmente robots sin conexión.
Entorno de programación
El software OLP permite al usuario programar el robot en una computadora, independientemente del hardware, en lugar de retirar el robot de la producción, lo que es el caso cuando se programa utilizando el método de botonera colgante programable. Al importar un modelo CAD de la pieza, el software puede generar automáticamente las trayectorias de la ruta y crear el programa en cuestión de minutos.
Entorno de simulación
Cuando se utiliza un software OLP, se crea una copia virtual del sistema robótico real. Esto incluye un modelo virtual del robot, herramientas, rieles de seguridad, mesas, posicionadores y cualquier otra cosa que exista en la celda del robot del mundo real.
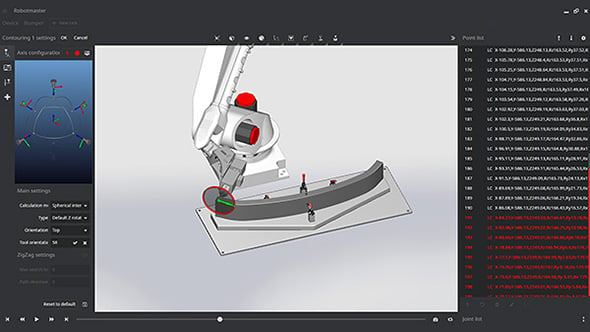
Software de programación y simulación fuera de línea
Al superponer estos dos entornos, se mejoran aún más las potentes capacidades de programación, ya que el usuario puede ver el resultado del programa y puede validar visualmente que el programa está libre de errores robóticos como colisiones, límites de alcance o articulaciones o singularidades, configuraciones que restringen el movimiento del brazo robótico.
Esta poderosa visualización permite al usuario realizar fácilmente ajustes en la configuración del proceso hasta lograr los resultados deseados. Un potente software de programación fuera de línea guiará al usuario con señales visuales para eliminar cualquier error robótico en el programa.
Un software de programación sin capacidades de simulación requeriría que el usuario fuera un experto en códigos de robot para crear un programa con éxito. Esto haría que el proceso de validar un programa antes de ejecutarlo en el mundo real fuera muy complicado y demandaría mucho tiempo. Cada marca de robot utiliza un lenguaje de programación diferente, lo que requiere que el usuario sea muy fluido en cada uno de estos lenguajes para escribir y editar competentemente el código del robot.
La simulación es una herramienta poderosa que complementa el motor de programación dentro de la OLP. El potente software OLP, como Robotmaster, va un paso más allá. Al utilizar un simulador de motor de cinemática inversa, los usuarios no solo pueden ver la simulación de su programa, sino que también pueden acelerar, rebobinar o avanzar rápidamente el programa. Para quienes leen esto y no son desarrolladores de software, les recomiendo que consideren todos los cálculos y procesamientos que ocurren en segundo plano. Lo que se muestra dentro del software OLP no es solo una animación del programa, sino más bien una visualización creada mediante la recopilación de datos disponibles de los componentes de la celda, las herramientas, los parámetros del proceso, las limitaciones del robot y la geometría de la pieza.
Cuando se acelera la simulación, también lo hacen los cálculos de programación. Es importante tener en cuenta que no todo el software OLP puede manejar estas velocidades de cálculo rápidas. La mayoría del software requiere que la simulación se reproduzca de principio a fin a una sola velocidad, sin embargo, esta flexibilidad ahorra tiempo al revisar programas largos o permite al usuario avanzar rápidamente a través de un programa hasta la sección donde se están realizando los ajustes. Al final del día, el objetivo del software de programación fuera de línea es reducir el tiempo de programación, de modo que cuanto más rápido sea el proceso de validación, más rápido estará el programa completo y listo para la producción.
La capacidad de validar, verificar o simular el proceso antes de realizarlo en el mundo real es vital para garantizar que el programa ofrezca los resultados deseados, sin colisiones ni errores del programa.
Este par perfecto es una gran herramienta para aquellos que quieren programar robots sin ser expertos en robótica o codificación. Sin embargo, también es una herramienta valiosa para quienes diseñan sistemas robóticos. Usando un software OLP, pueden programar la tarea en la pieza y luego llevar ese programa al entorno de simulación para ver qué diseños de celdas y componentes son necesarios para que el robot realice la tarea según lo programado. Un integrador puede realizar fácilmente ajustes al programa o al diseño de la celda y visualizar si funcionará. Por esta razón, los integradores de robots lo utilizan como herramienta de diseño, validación y ventas. Los programadores pueden evaluar rápidamente las configuraciones de las celdas, detectar posibles colisiones y realizar estudios de alcance, de modo que descubren problemas en las primeras etapas del proceso de diseño y automatización.
El mejor software de programación fuera de línea combina programación y simulación a la perfección. Al generar un programa y simular el proceso dentro de la misma plataforma, la optimización del programa se realiza de forma automática en lugar de mediante prueba y error, lo que ahorra dinero y recursos.