¿Qué es la programación fuera de línea?
El software de programación fuera de línea (OLP) o de programación de robots fuera de línea (OLRP) es un método de programación de robots que permite a los usuarios programar su robot de fabricación industrial desde una computadora utilizando software en lugar de utilizar el controlador del robot. Con este método, los fabricantes pueden mantener su robot en producción mientras los programas se generan con software informático. Esto reduce drásticamente el tiempo muerto del robot, aumenta la eficiencia de la producción y ahorra costes.
Las instalaciones de fabricación de todo el mundo están adoptando la automatización para maximizar su productividad y seguir siendo competitivas. Los robots de fabricación tienen muchas ventajas, como una alta precisión y una producción constante, lo que se traduce en un ROI mucho mejor en comparación con la finalización manual de los procesos. Los robots tienen una desventaja, sin embargo, cuando se trata de programación: la mayoría de las veces, deben estar fuera de línea para actualizarse o programarse, lo que significa retrasos en la producción y pérdida de ingresos.
¿Cómo funciona la programación fuera de línea?
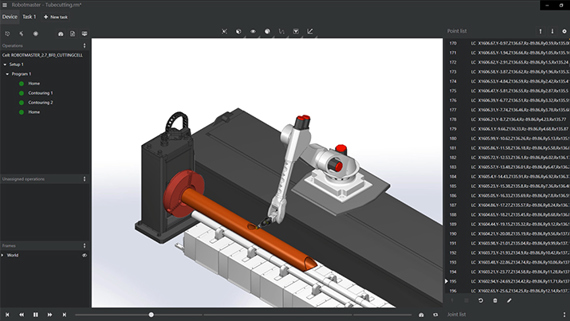
El software de OLP funciona con modelos CAD 3D para definir tareas como la planificación de rutas, la programación y la ingeniería.
El entorno de la OLP utiliza un modelo CAD 3D de la celda de trabajo del robot. Toda la programación se completa en el espacio virtual, lo que permite la resolución de problemas antes de que se instale el robot. Los programas se pueden crear, simular y editar en el entorno de la OLP, lo que garantiza que el robot funcione como se requiere. Una vez generado el código del robot, se carga en el robot.
Ventajas clave de la programación fuera de línea frente a la programación del controlador colgante de programación
Integración de robots más rápida
Tanto si se trata de una nueva instalación como de una nueva implementación, el tiempo siempre es un factor esencial. Al crear, ajustar y probar la programación en un entorno virtual, cuando el robot está instalado, está listo para funcionar, ahorrando días o semanas en comparación con un controlador colgante de programación.
No hay tiempo de inactividad
Con la programación del controlador colgante de programación, el robot debe estar en modo de programación. La OLP puede cargar la programación en un robot mientras está en funcionamiento, lo que significa menos retrasos en la fabricación.
Seguridad
Tanto si se enfrenta a un problema de seguridad debido a la configuración del robot como si el acceso al robot está restringido debido a los protocolos de trabajo desde casa, la OLP se puede completar desde un portátil en un lugar seguro y cargarse en el robot sin necesidad de acceder a un controlador colgante de programación.
Conversiones rápidas
La OLP puede programar un robot para la pieza B mientras completa la ejecución de la pieza A. Tan pronto como la parte A esté completa, se puede cargar la programación de la parte B y comenzar la tarea sin apagar el robot. La OLP permite tiempos de ciclo más rápidos, lo que permite una mayor mezcla de trabajos con transiciones más rápidas.
Aplicación universal
Pocas operaciones de fabricación se atribuyen a la lealtad a la marca, ya que solo operan una marca de robot. Para la mayoría, el robot que realiza la tarea al mejor precio es el que se instala, lo que lleva a una variedad de robots que deben programarse. Un software de OLP verdadero debería ser ‘agnóstico respecto al robot’, es decir, capaz de generar código para una variedad de marcas de robots.
Facilidad de uso
La OLP adecuada requiere conocimientos de procesos, sin embargo, no requiere programación avanzada ni experiencia en robótica. La OLP se desarrolla en torno al usuario y está diseñada para ofrecer una experiencia simple y elegante al usuario. Además, gracias a la capacidad de interactuar con varias marcas de robots, sus programadores no necesitan aprender interfaces OEM patentadas para cada marca de robot OEM.
Pruebe las nuevas configuraciones
Añadir un robot a su operación de fabricación es una inversión de capital significativa. El software de OLP debe tener una interfaz de usuario intuitiva que permita al usuario diseñar y probar varias configuraciones en simulación 3D antes de instalar el robot. Diseñe, identifique y resuelva problemas antes de que llegue el robot.