Wie Simulation die Offline-Programmierung verbessert
Eine der Stärken von Offline-Programmiersoftware (OLP) besteht darin, dass sie zwei leistungsstarke Funktionen kombiniert: Simulation und Programmierung. Diese beiden Fähigkeiten passen wie zwei perfekte Puzzleteile zusammen, wenn es darum geht, Roboter offline effektiv zu programmieren.
Programmierumgebung
OLP-Software ermöglicht es dem Benutzer, den Roboter auf einem Computer zu programmieren, unabhängig von der Hardware, anstatt den Roboter aus der Produktion zu nehmen, wie dies bei der Programmierung mit Programmierhandgerät der Fall ist. Durch den Import eines CAD-Modells des Werkstücks kann die Software innerhalb weniger Minuten automatisch die Werkzeugpfade generieren und das Programm erstellen.
Simulationsumgebung
Bei Verwendung von OLP-Software wird eine virtuelle Kopie des realen Robotersystems erstellt. Dazu gehören ein virtuelles Modell des Roboters, Werkzeuge, Sicherheitsgeländer, Tische, Positionierer und alles andere, was in der realen Roboterzelle vorhanden ist.
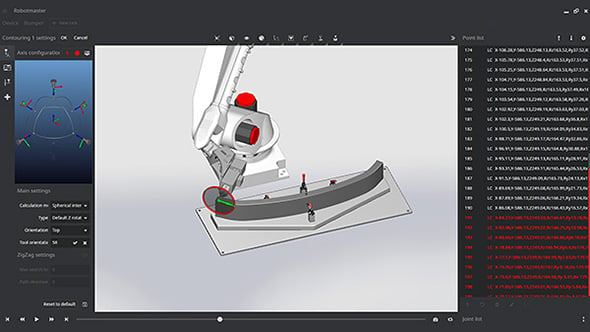
Offline-Programmier- und Simulationssoftware
Durch die Überlagerung dieser beiden Umgebungen werden die leistungsstarken Programmierfunktionen weiter verbessert, da der Benutzer das Programmergebnis sehen und visuell überprüfen kann, dass das Programm frei von Roboterfehlern ist, wie Kollisionen, Gelenk- oder Reichweitengrenzen oder Singularitäten, Konfigurationen, welche die Bewegung des Roboterarms einschränken.
Diese leistungsstarke Visualisierung ermöglicht es dem Benutzer, die Prozesseinstellungen mühelos anzupassen, bis die gewünschten Ergebnisse erreicht sind. Leistungsstarke Offline-Programmiersoftware leitet den Benutzer mit visuellen Hinweisen dabei an, Roboterfehler im Programm zu beseitigen.
Eine Programmiersoftware ohne Simulationsfunktionen erfordert, dass der Benutzer ein Robotercode-Experte ist, um ein Programm erfolgreich erstellen zu können. Dies würde den Prozess der Validierung eines Programms vor dessen Ausführung in der realen Welt schwierig und zeitaufwendig machen. Jede Robotermarke verwendet eine andere Programmiersprache, die der Benutzer gut beherrschen muss, um Robotercode kompetent zu schreiben und zu bearbeiten.
Simulation ist ein leistungsstarkes Tool, das die Programmier-Engine innerhalb von OLP ergänzt. Leistungsstarke OLP-Software wie Robotmaster geht noch einen Schritt weiter. Mit einem Reverse-Kinematics-Engine-Simulator können Benutzer nicht nur die Simulation ihres Programms sehen, sondern das Programm auch schneller laufen lassen und vor- oder zurückspulen. An die Nicht-Software-Entwickler unter Ihnen, die dies lesen – bitte denken Sie an die ganzen Berechnungen und Verarbeitungsschritte, die dabei im Hintergrund ausgeführt werden müssen. Bei OLP-Software handelt es sich nicht nur um eine Animation des Programms, sondern um eine Visualisierung, die anhand der Sammlung verfügbarer Daten aus Zellkomponenten, Werkzeugen, Prozessparametern, Robotergrenzen und Werkstückgeometrie erstellt wird.
Wenn die Simulation beschleunigt wird, werden auch die Programmierungsberechnungen beschleunigt. Es ist wichtig zu beachten, dass nicht jede OLP-Software diese schnellen Berechnungsgeschwindigkeiten bewältigen kann. Die meisten Softwareprogramme erfordern, dass die Simulation vom Start bis zum Ende mit der gleichen Geschwindigkeit abgespielt wird. Diese Flexibilität spart jedoch Zeit bei der Überprüfung langer Programme oder ermöglicht es dem Benutzer, schnell durch ein Programm zu dem Abschnitt zu springen, in dem Einstellungen vorgenommen werden. Letztendlich ist es das Ziel der Offline-Programmiersoftware, die Programmierzeit zu reduzieren. Je schneller der Überprüfungsprozess abläuft, desto schneller ist das Programm fertig und bereit für die Produktion.
Die Möglichkeit, den Prozess zu überprüfen, zu verifizieren oder zu simulieren, bevor er in der realen Welt durchgeführt wird, ist entscheidend dafür, sicherzustellen, dass das Programm die gewünschten Ergebnisse ohne Kollisionen oder Programmfehler liefert.
Dieses perfekte Paar ist ein großartiges Werkzeug für alle, die Roboter programmieren möchten, ohne Robotik- oder Programmierexperte zu sein. Es ist aber auch ein wertvolles Werkzeug für diejenigen, die robotergestützte Systeme konstruieren. Mithilfe einer OLP-Software können sie die Aufgabe am Werkstück programmieren und dieses Programm dann in die Simulationsumgebung übertragen, um zu sehen, welche Zellanordnungen und Komponenten für den Roboter erforderlich sind, damit dieser die Aufgabe wie programmiert ausführen kann. Ein Integrator kann einfach Einstellungen am Programm oder Zelldesign vornehmen und prüfen, ob es funktioniert. Aus diesem Grund nutzen Roboterintegratoren es als Entwicklungs-, Überprüfungs- und Vertriebswerkzeug. Programmierer können Zellkonfigurationen schnell auswerten, potenzielle Kollisionen erkennen und Reichweitenstudien durchführen, um Probleme frühzeitig im Entwicklungs- und Automatisierungsprozess zu erkennen.
Die beste Offline-Programmiersoftware kombiniert Programmierung und Simulation nahtlos. Durch die Generierung eines Programms und die Simulation des Prozesses innerhalb derselben Plattform erfolgt die Programmoptimierung automatisch und nicht durch Ausprobieren, was Geld und Ressourcen spart.